Talk for Harvard
Pathwise Conditioning and
Non-Euclidean
Gaussian Processes










$$ \htmlData{fragment-index=0,class=fragment}{ x_0 } \qquad \htmlData{fragment-index=1,class=fragment}{ x_1 = x_0 + f(x_0)\Delta t } \qquad \htmlData{fragment-index=2,class=fragment}{ x_2 = x_1 + f(x_1)\Delta t } \qquad \htmlData{fragment-index=3,class=fragment}{ .. } $$

$$ (\v\theta,\v{y}) \~\f{N}(\v\mu,\m\Sigma) $$

$$ (\v\theta\given\v{y}=\v\gamma) \~\f{N}(\v\mu_{\v\theta\given\v{y}}, \m\Sigma_{\v\theta\given\v{y}}) $$
$$ \begin{aligned} \v\mu_{\v\theta\given\v{y}} &= \v\mu_{\v\theta} + \m\Sigma_{\v\theta\v{y}}\m\Sigma_{\v{y}\v{y}}^{-1}(\v\gamma-\v\mu_{\v{y}}) & \m\Sigma_{\v\theta\given\v{y}} &= \m\Sigma_{\v\theta\v\theta} - \m\Sigma_{\v\theta\v{y}}\m\Sigma_{\v{y}\v{y}}^{-1}\m\Sigma_{\v{y}\v\theta} \end{aligned} $$

$$ (\v\theta,\v{y}) \~\f{N}(\v\mu,\m\Sigma) $$

$$ (\v\theta\given\v{y}=\v\gamma) = \v\theta + \m\Sigma_{\v\theta\v{y}}\m\Sigma_{\v{y}\v{y}}^{-1}(\v\gamma-\v\mu_{\v{y}}) $$
$$ \htmlData{class=fragment,fragment-index=2} { (f\given\v{y})(\.) = } \htmlData{class=fragment,fragment-index=0} { \mathrlap{f(\.)} } \htmlData{class=fragment,fragment-index=3} { \ubr{\phantom{f(\.)}}{\c{O}(N_*^3)} } \htmlData{class=fragment,fragment-index=1} { + \m{K}_{(\.)\v{x}} } \htmlData{class=fragment,fragment-index=1} { \mathrlap{\m{K}_{\v{x}\v{x}}^{-1}} } \htmlData{class=fragment,fragment-index=3} { \ubr{\phantom{\m{K}_{\v{x}\v{x}}^{-1}}}{\c{O}(N^3)} } \htmlData{class=fragment,fragment-index=1} { (\v{y} - f(\v{x})) } $$
$$ \htmlData{class=fragment,fragment-index=0}{ (f\given\v{y})(\.) } \htmlData{class=fragment,fragment-index=1}{ \approx \sum_{i=1}^L w_i \phi_i(\.) } \htmlData{class=fragment,fragment-index=4}{ \mathllap{\ubr{\vphantom{\sum_{j=1}^m}\phantom{\sum_{i=1}^\ell w_i \phi_i(\.)}}{\t{basis function prior approx.}}} } \htmlData{class=fragment,fragment-index=2}{ + \sum_{j=1}^N v_j k(x_j,\.) } \quad \phantom{\v{v} = \m{K}_{\v{x}\v{x}}^{-1}(\v{u} - \m\Phi^T\v{w})} \htmlData{class=fragment fade-out d-print-none,fragment-index=6}{ \htmlData{class=fragment,fragment-index=3}{ \mathllap{\v{v} = \m{K}_{\v{x}\v{x}}^{-1}(\v{u} - \m\Phi^T\v{w})} } } \htmlData{class=fragment,fragment-index=6}{ \mathllap{\begin{gathered} \vphantom{} \\[-2ex] \c{O}(N_*)\,\t{complexity} \\[-0.5ex] \smash{\t{in num. test points}} \end{gathered}} } $$
Thompson sampling: choose $$ \htmlClass{fragment}{ x_{n+1} = \argmin_{x\in\c{X}} \alpha_n(x) } \qquad \htmlClass{fragment}{ \alpha_n \~ f\given\v{y} . } $$



$$ (f\given\v{y})(\.) = f(\.) + \sum_{i=1}^N v_i^{(\v{y})} k(x_i,\.) \vphantom{\sum_{j=1}^M v_j^{(\v{u})} k(z_j,\.)} $$ Exact Gaussian process: $\c{O}(N^3)$
$$ (f\given\v{y})(\.) \approx f(\.) + \sum_{j=1}^M v_j^{(\v{u})} k(z_j,\.) $$ Sparse Gaussian process: $\c{O}(NM^2)$
$$ \htmlClass{fragment}{ \f{cond}(\m{A}) } \htmlClass{fragment}{ = \lim_{\eps\to0} \sup_{\norm{\v\delta} \leq \eps\norm{\v{b}}} \frac{\norm{\m{A}^{-1}(\v{b} + \v\delta) - \m{A}^{-1}\v{b}}_2}{\eps\norm{\m{A}^{-1}\v{b}}_2} } \htmlClass{fragment}{ = \frac{\lambda_{\max}(\m{A})}{\lambda_{\min}(\m{A})} } $$
Result. Let $\m{A}$ be a symmetric positive definite matrix of size $N \x N$, where $N \gt 10$. Assume that $$ \f{cond}(\m{A}) \leq \frac{1}{2^{-t} \x 3.9 N^{3/2}} $$ where $t$ is the length of the floating point mantissa, and that $3N2^{-t} \lt 0.1$. Then floating point Cholesky factorization will succeed, producing a matrix $\m{L}$ satisfying $$ \htmlClass{fragment}{ \m{L}\m{L}^T = \m{A} + \m{E} } \qquad\qquad \htmlClass{fragment}{ \norm{\m{E}}_2 \leq 2^{-t} \x 1.38 N^{3/2} \norm{\m{A}}_2 . } $$
Are kernel matrices always well-conditioned? No.
One-dimensional time series on grid: Kac–Murdock–Szegö matrix $$ \m{K}_{\v{x}\v{x}} = \scriptsize\begin{pmatrix} 1 & \rho &\rho^2 &\dots & \rho^{n-1} \\ \rho & 1 & \rho & \dots & \rho^{n-2} \\ \vdots & \vdots &\ddots & \ddots & \vdots \\ \rho^{n-1} & \rho^{n-2} & \rho^{n-3} & \dots & 1 \end{pmatrix} $$ for which $\frac{1+ 2\rho + 2\rho\eps + \rho^2}{1 - 2\rho - 2\rho\eps + \rho^2} \leq \f{cond}(\m{K}_{\v{x}\v{x}}) \leq \frac{(1+\rho)^2}{(1-\rho)^2}$, where $\eps = \frac{\pi^2}{N+1}$.



Proposition. Assuming spatial decay and stationarity, separation controls $\f{cond}(\m{K}_{\v{z}\v{z}})$ uniformly in $M$.





$$ \htmlClass{fragment}{ (f\given\v{y})(\.) = f(\.) + \m{K}_{(\.)\v{z}} (\m{K}_{\v{z}\v{z}} + \m\Lambda)^{-1} (\v{u} - f(\v{z}) - \v\epsilon) } \qquad \htmlClass{fragment}{ \v\epsilon \~\f{N}(\v{0},\m\Lambda) } $$





$\nu = 1/2$

$\nu = 3/2$

$\nu = 5/2$

$\nu = \infty$
$$ \htmlData{class=fragment fade-out,fragment-index=9}{ \footnotesize \mathclap{ k_\nu(x,x') = \sigma^2 \frac{2^{1-\nu}}{\Gamma(\nu)} \del{\sqrt{2\nu} \frac{\norm{x-x'}}{\kappa}}^\nu K_\nu \del{\sqrt{2\nu} \frac{\norm{x-x'}}{\kappa}} } } \htmlData{class=fragment d-print-none,fragment-index=9}{ \footnotesize \mathclap{ k_\infty(x,x') = \sigma^2 \exp\del{-\frac{\norm{x-x'}^2}{2\kappa^2}} } } $$
$\sigma^2$: variance
$\kappa$: length scale
$\nu$: smoothness
$\nu\to\infty$: recovers squared exponential kernel
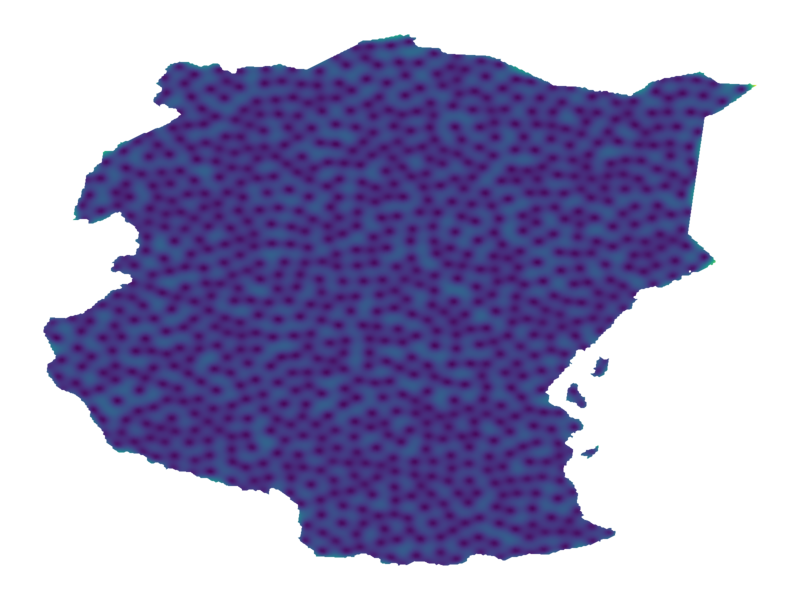
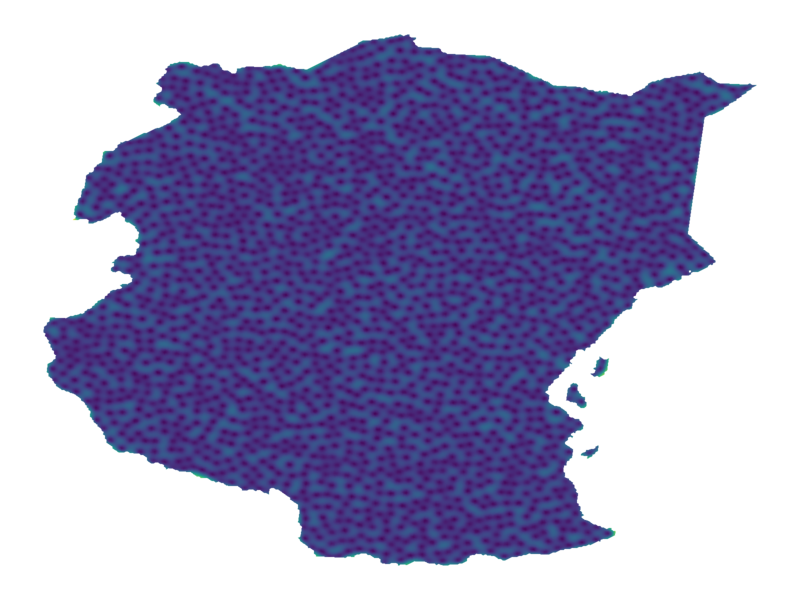
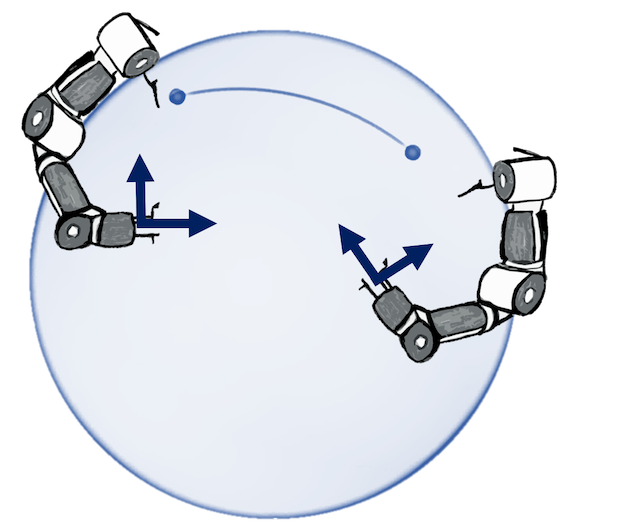
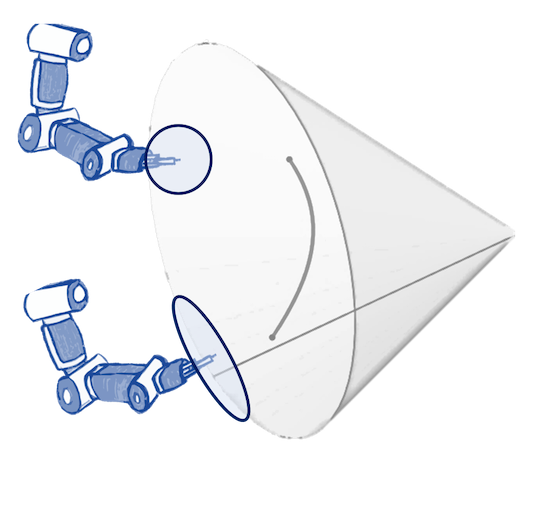
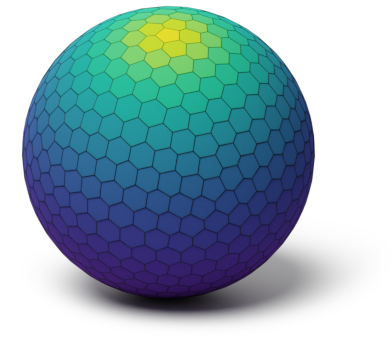
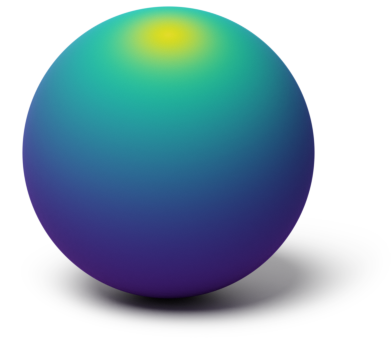
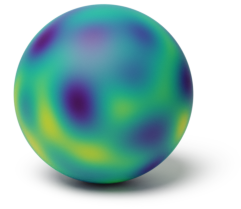
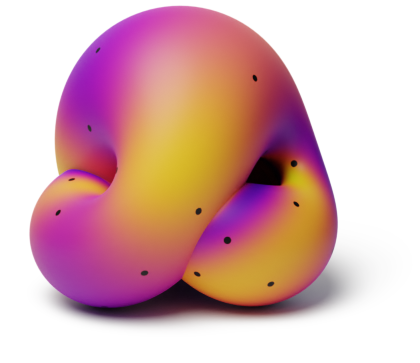
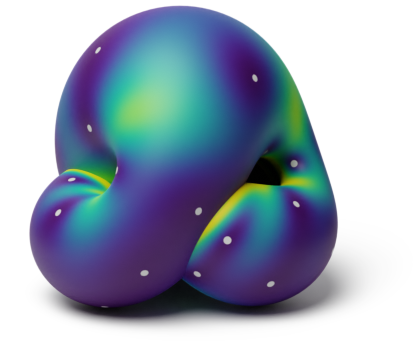
$$ k_\infty^{(d_g)}(x,x') = \sigma^2\exp\del{-\frac{d_g(x,x')^2}{2\kappa^2}} $$
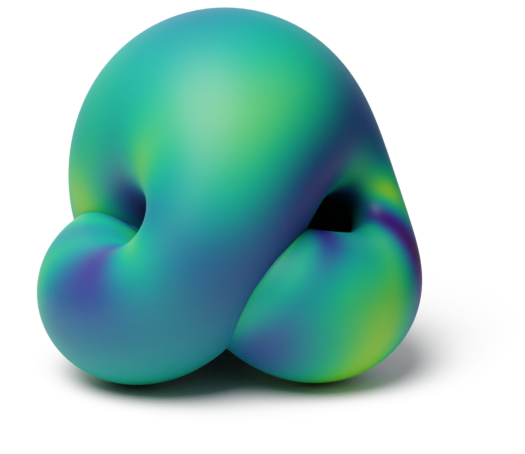
Theorem. (Feragen et al.) Let $M$ be a complete Riemannian manifold without boundary. If $k_\infty^{(d_g)}$ is positive semi-definite for all $\kappa$, then $M$ is isometric to a Euclidean space.
$$ \htmlData{class=fragment,fragment-index=0}{ \underset{\t{Matérn}}{\undergroup{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}} f = \c{W}}} } \qquad \htmlData{class=fragment,fragment-index=1}{ \underset{\t{squared exponential}}{\undergroup{\vphantom{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}}} e^{-\frac{\kappa^2}{4}\Delta} f = \c{W}}} } $$
$\Delta$: Laplacian
$\c{W}$: (rescaled) white noise
$e^{-\frac{\kappa^2}{4}\Delta}$: (rescaled) heat semigroup
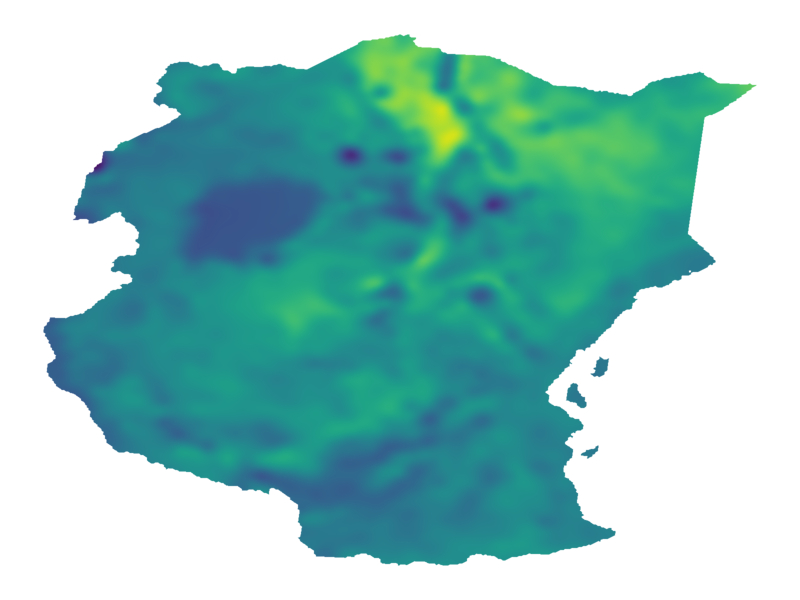
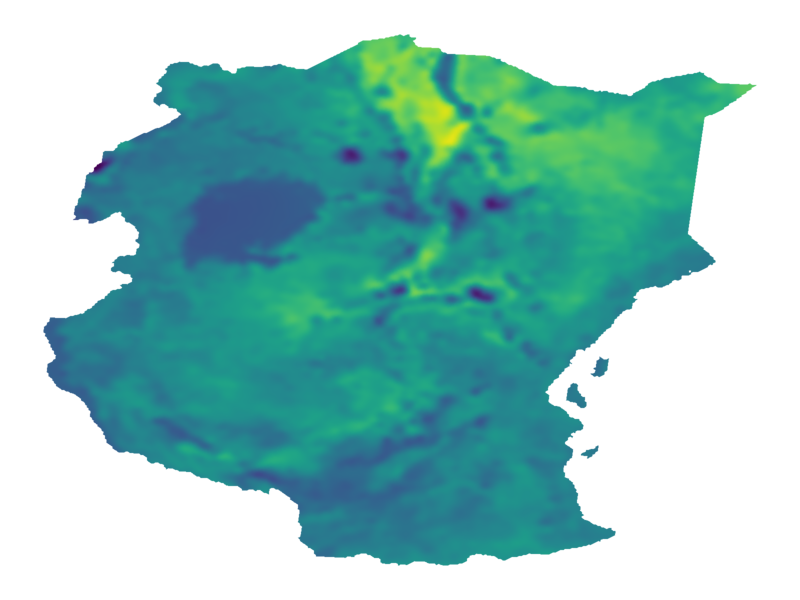
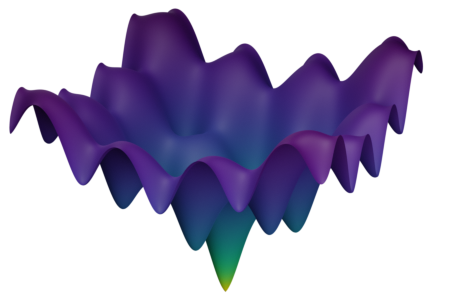
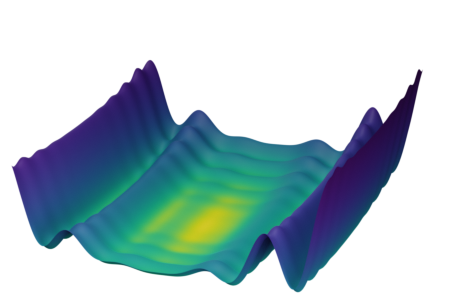
$$ k_\nu(x,x') = \frac{\sigma^2}{C_\nu} \sum_{n=0}^\infty \del{\frac{2\nu}{\kappa^2} - \lambda_n}^{\nu-\frac{d}{2}} f_n(x) f_n(x') $$




$$ f : G \to \R $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g1.svg}}\Big) \to \R $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g2.svg}}\Big) \to \R $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g3.svg}}\Big) \to \R $$
$$ \htmlClass{fragment}{ (\m\Delta\v{f})(x) = \sum_{x' \~ x} w_{xx'} (f(x) - f(x')) } $$ $$ \htmlClass{fragment}{ \m\Delta = \m{D} - \m{W} } $$
$\m{D}$: degree matrix
$\m{W}$: (weighted) adjacency matrix
$$ \htmlClass{fragment}{ \underset{\t{Matérn}}{\undergroup{\del{\frac{2\nu}{\kappa^2} + \m\Delta}^{\frac{\nu}{2}} \v{f} = \c{W}\mathrlap{\hspace*{-2.42ex}\c{W}\hspace*{-2.42ex}\c{W}}}} } \qquad \htmlClass{fragment}{ \underset{\t{squared exponential}}{\undergroup{\vphantom{\del{\frac{2\nu}{\kappa^2} - \m\Delta}^{\frac{\nu}{2}+\frac{d}{4}}} e^{\frac{\kappa^2}{4}\m\Delta} \v{f} = \c{W}\mathrlap{\hspace*{-2.42ex}\c{W}\hspace*{-2.42ex}\c{W}}}} } $$
$\m\Delta$: graph Laplacian
$\c{W}\mathrlap{\hspace*{-2.42ex}\c{W}\hspace*{-2.42ex}\c{W}}$: standard Gaussian
$$ \htmlClass{fragment}{ \underset{\t{Matérn}}{\undergroup{\vphantom{\v{f} \~\f{N}\del{\v{0},e^{-\frac{\kappa^2}{4}\m\Delta}}} \v{f} \~\f{N}\del{\v{0},{\textstyle\del{\frac{2\nu}{\kappa^2} + \m\Delta}^{-\nu}}}}} } \qquad \htmlClass{fragment}{ \underset{\t{squared exponential}}{\undergroup{\v{f} \~\f{N}\del{\v{0},e^{-\frac{\kappa^2}{2}\m\Delta}}}} } $$
$$ \htmlClass{fragment}{ k_\nu(x,x') = \frac{\sigma^2}{C_\nu} \sum_{n=1}^{|G|} \del{\frac{2\nu}{\kappa^2} + \lambda_n}^{-\nu} \v{f}_n(x)\v{f}_n(x') } $$ $\lambda_n,\v{f}_n$: eigenvalues and eigenvectors of graph Laplacian








$ \large\x\, $

$ \large\x\, $
$ \large= $
$$ \begin{aligned} \htmlData{fragment-index=1,class=fragment}{ k(g_1,g_2) } & \htmlData{fragment-index=1,class=fragment}{ = \sum_{n=1}^\infty a(\lambda_n) \v{f}_n(g_1)\v{f}_n(g_2) } \\ & \htmlData{fragment-index=2,class=fragment}{ = \sum_{\lambda\in\Lambda} a^{(\lambda)} \f{Re} \chi^{(\lambda)}(g_2^{-1} \. g_1) } \end{aligned} $$





J. T. Wilson,* V. Borovitskiy,* P. Mostowsky,* A. Terenin,* M. P. Deisenroth. Efficiently Sampling Functions from Gaussian Process Posteriors. International Conference on Machine Learning, 2020. Honorable Mention for Outstanding Paper Award.
J. T. Wilson,* V. Borovitskiy,* P. Mostowsky,* A. Terenin,* M. P. Deisenroth. Pathwise Conditioning of Gaussian Process. Journal of Machine Learning Research, 2021.
V. Borovitskiy,* P. Mostowsky,* A. Terenin,* M. P. Deisenroth. Matérn Gaussian Processes on Riemannian Manifolds. Advances in Neural Information Processing Systems, 2020.
V. Borovitskiy,* I. Azangulov,* P. Mostowsky,* A. Terenin,* M. P. Deisenroth, N. Durrande. Matérn Gaussian Processes on Graphs. Artificial Intelligence and Statistics, 2021. Best Student Paper Award.
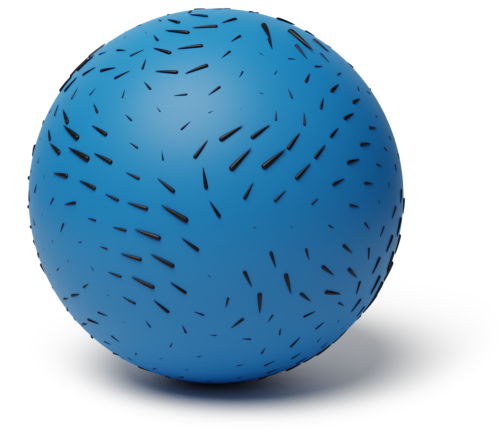
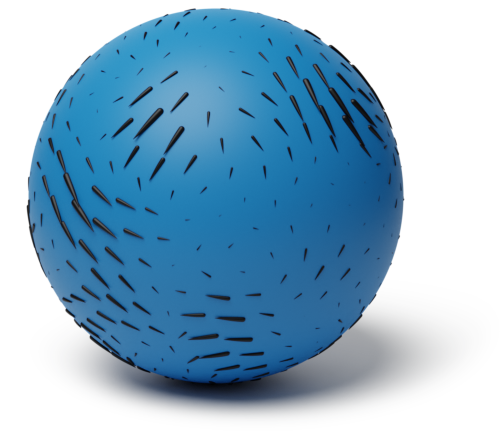
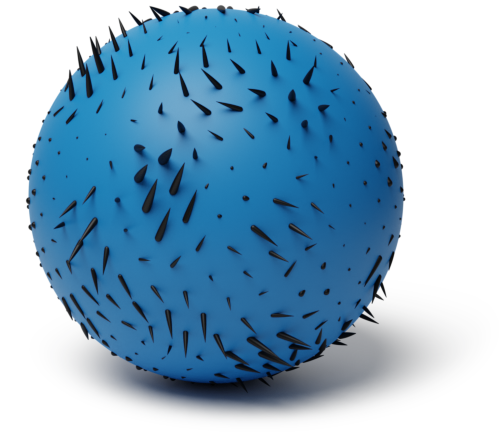
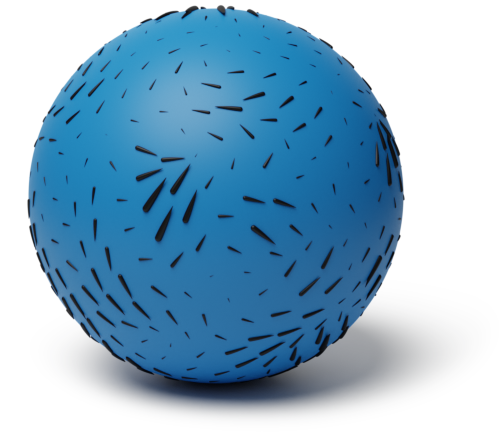
M. J. Hutchinson,* A. Terenin,* V. Borovitskiy,* S. Takao,* Y. W. Teh, M. P. Deisenroth. Vector-valued Gaussian Processes on Riemannian Manifolds via Gauge Independent Projected Kernels. Advances in Neural Information Processing Systems, 2021.
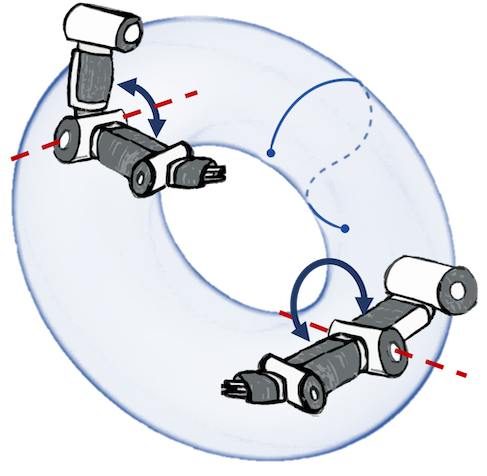
N. Jaquier,* V. Borovitskiy,* A. Smolensky, A. Terenin, T. Asfour, L. Rozo. Geometry-aware Bayesian Optimization in Robotics using Riemannian Matérn Kernels. Conference on Robot Learning, 2021.
I. Azangulov, A. Smolensky, A. Terenin, V. Borovitskiy. Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces I: the Compact Case. arXiv: 2208.14960, 2022.
A. Terenin,* D. R. Burt,* A. Artemev, S. Flaxman, M. van der Wilk, C. E. Rasmussen, H. Ge. Numerically Stable Sparse Gaussian Processes via Minimum Separation using Cover Trees. arXiv: 2210.07893, 2022.
*Equal contribution
